
برای افزایش انعطاف پذیری یک سیستم کنترل موتور، یک درایو فرکانس متغیر (VFD) یک دستگاه رایج است که بسیاری از مشکلات کنترل موتور را حل می کند. در این مقاله نحوه کنترل ورودی دستی VFD ها را یاد بگیرید.
درایوهای فرکانس متغیر بسیاری از چالشهای مربوط به راهاندازی موتورهای سه فاز را حل میکنند، از جمله سرعتهای قابل تنظیم، شبکهسازی بسیاری از موتورها با یکدیگر برای کل فرآیند، و در نهایت توانایی تنظیم عملکرد بدون تغییر سیمکشی. با این حال، برای عملیات ساده، این درایوها همچنان می توانند از همان کنترل های فشاری دستی مورد استفاده در مدارهای راه اندازی موتور استفاده کنند، اما با قابلیت های اضافی.
راندن موتورهای سه فاز با تجهیزات مناسب می تواند فرآیندی بسیار ساده باشد. مدارهای کنترل دستی از جمله کنتاکتورها و استارترها می توانند بسیار ارزان باشند، اما از چند جهت محدود هستند. اولاً، این مدارها موتورها را با سرعتی کمتر از سرعت کامل به حرکت در نمی آورند. همچنین اگر می خواهید الگوی عملکرد را تغییر دهید، باید کل مدار کنترل را دوباره سیم کشی کنید.
برای افزایش انعطافپذیری سیستم کنترل موتور، یک درایو فرکانس متغیر (VFD) وسیلهای رایج است که بسیاری از مشکلات کنترل موتور را حل میکند. به طور خاص، یک VFD یکی از معدود گزینههایی است که برای عملکرد به سرعتهای متفاوتی نیاز است.
خوشبختانه استفاده از VFD به PLC یا سیستم کنترل شبکه ای غول پیکر نیاز ندارد. اما اگر یک سیستم کنترل بزرگتر وجود نداشته باشد، VFD یک گزینه ساده برای ادغام موتور در یک سیستم کنترل به روز ارائه می دهد. محافظت از عملکرد یک سیستم بسیار مفید است، به خصوص زمانی که خیلی گران نباشد.

استفاده از عناصر کنترلی ساده و دستی مانند دکمههای استارت/استپ، سوئیچهای جهت و کنترل سرعت برای اتصال به VFD چندان دشوار نیست. اگرچه مارک ها و مدل های زیادی وجود دارد، استراتژی کلی در تمام VFD ها یکسان است. برای عملکرد صحیح، دو عنصر متمایز باید در نظر گرفته شود: سیم کشی، و پارامترها.
سیم کشی VFD I/O
هر VFD شامل مجموعه ای از ترمینالها می شود که به کاربر اجازه می دهد سیم های I/O را متصل کند. به طور معمول، اینها بر روی همان سیستم 24VDC یا12VDC مانند بقیه دستگاه های سیستم کنترل خواهند بود. سیم ها ممکن است مستقیماً به یک بلوک ترمینال پیچ دار متصل شوند یا ممکن است مجموعه ای از یک یا چند کانکتور از پیش سیمی روی برد مدار باشند. مطمئن شوید که از حداقل اندازه ضخامت سیم برای این سیم های کنترل استفاده می شود، اما آنها می توانند بسیار نازک باشند زیرا جریان کنترل بسیار کمی استفاده می شود.
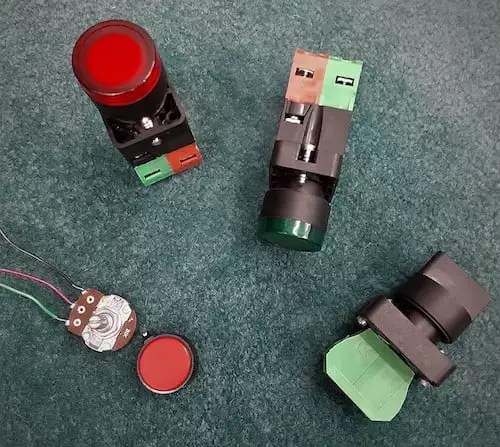
با یک دکمه NO، یک دکمه NC، چندین کلید انتخابگر و یک پتانسیومتر، تقریباً انواع مختلفی از سناریوهای کنترل را می توان متصل کرد.
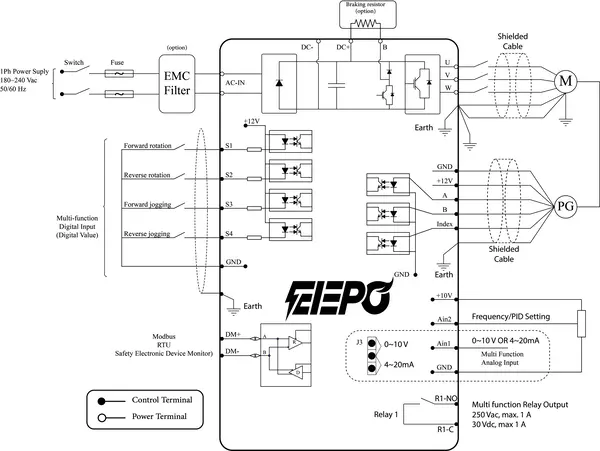
ابتدا، نمودار سیم کشی را که ممکن است به صورت آنلاین یا در اسناد ارائه شده یافت شود، شناسایی کنید. نمودار باید چندین تابع ترمینال را نشان دهد:
- ترمینال منبع تغذیه باید با 24 ولت نشان داده شود
- زمینه مشترک یا COM
- یک خروجی 10 ولت اغلب برای دستگاه کنترل سرعت آنالوگ ارائه می شود
- مجموعه بعدی پایانهها ورودیهای دیجیتال هستند، شاید «DI» یا «In» و اغلب چهار تا شش عدد از این پایانهها وجود دارد.
- یک ورودی آنالوگ منفرد که ممکن است برای ولتاژ به عنوان “AI” یا “V” برچسب گذاری شود
- بسیاری از VFD ها همچنین دارای یک رله الکترومکانیکی برای ارائه اطلاعات خروجی هستند که بر اساس نقاط عملیاتی خاصی تغییر می کند.
ورودی های دیجیتال
اگر VFD به عنوان یک نوع سیم کشی “منبع” یا “ورودی” تنظیم شده است، برای اتصال صحیح سیم ها باید به آن توجه داشت. برخی از VFD ها دارای یک سوئیچ کلید برای انتخاب نوع هستند، در حالی که برخی دیگر به سادگی با اتصال منبع تغذیه در هر طرحی که مناسب تر است تنظیم می شوند.
اگر VFD برای سیم کشی نوع ‘Sinking’ تنظیم شده باشد، هر دستگاه کنترل باید به ولتاژ مثبت متصل شود. سپس هر دستگاه به ترمینال ورودی دیجیتال مناسب خود متصل می شود. اغلب، اما نه همیشه، اولین ترمینال همیشه به دکمه STOP که معمولا بسته است وصل می شود. عملکرد واقعی هر ورودی دیجیتال بعداً توسط پارامترها پیکربندی می شود.
اگر VFD برای سیمکشی «Sourcing» تنظیم شده باشد، همان مورد بالا صادق است با این تفاوت که COM به جای +V به هر دستگاه متصل است.
یک نکته مهم: برخی از VFD ها به دلایل ایمنی نیاز به اتصال سیم یا سوئیچ NC به ترمینال توقف دارند. در این مدل ها، حتی اگر با کنترل شبکه استفاده می شود، یک سیم باید از ترمینال +V به این ورودی کشیده شود.
ورودی آنالوگ
ورودی آنالوگ، مانند یک دستگیره پتانسیومتر دوار، یک روش کلاسیک و آسان برای انتخاب سرعت موتور است. برای پتانسیومتر سه ترمینال، ترمینال های 1 و 3 به منبع 10 ولت و COM متصل می شوند. ترتیب آنها تعیین می کند که آیا چرخش CW یا CCW باعث افزایش سرعت موتور می شود. ترمینال دوم (2) باید به ترمینال “AI” یا “V” متصل شود.
گاهی اوقات این سیگنال ولتاژ آنالوگ را می توان از یک PLC یا سیگنال کنترل کننده ساده 0-10 ولت ارسال کرد و به VFD اجازه می دهد در انواع مختلفی از سناریوها کار کند.
پارامترها
هر VFD نه بر اساس سیمکشی ورودی/خروجی، بلکه بر اساس منوی پارامترهایی که نحوه تأثیر هر ترمینال بر عملکرد را کنترل میکند، سفارشیسازی میشود.
مجموعه ای از دکمه ها در قسمت جلوی دستگاه تقریباً مطمئناً راهی برای دسترسی به پارامترها است، اما برای تعیین دقیق نحوه عملکرد ساختار باید به دفترچه راهنما مراجعه کرد. هر VFD از نظر تعداد پارامترها، نحوه دسترسی به آنها، مقادیر پیش فرض و نحوه نمایش هر حالت عملکرد کاملاً متفاوت است.
صرف نظر از طراحی و مدل، تعدادی از شباهت ها وجود دارد.
ابتدا، پارامتر کنترل باید طوری تنظیم شود که از پایانه های ورودی استفاده کند – نه کنترل محلی (صفحه کلید) و نه کنترل شبکه (مثلاً Modbus RS-485 یا اترنت).
در مرحله بعد، پارامترهای ورودی دیجیتال ممکن است بین چندین حالت کار تعیین شود:
- با یک ترمینال DI به جلو، با دیگری معکوس کنید
- توقف و شروع، تک جهت
- توقف، با کلیدهای تغییر جهت حرکت رو به جلو یا معکوس
- توقف، با یک استارت و یک کلید کنترل جهت دستی
- توقف و شروع با چند سوئیچ کلیدی که برای انتخاب بین سرعت های از پیش تعیین شده مختلف استفاده می شود
- توقف با Start یا Jog، قابل انتخاب با یک سوئیچ
حتی ممکن است چند مزیت اضافی با این ورودی های دیجیتال در دسترس باشد:
- بازنشانی خطا
- افزایش یا کاهش سرعت

{kind=link}