در این مقاله، یاد میگیرید که چگونه درایوهای فرکانس متغیر از اصل مدولاسیون عرض پالس برای ایجاد سیگنالهای آنالوگ از یک منبع دیجیتال، مانند درایوهای موتور، استفاده میکنند.
مدولاسیون عرض پالس یا PWM یک استراتژی رایج برای ایجاد انواع سیگنال های آنالوگ از یک منبع دیجیتال است. این یک روش رایج در هنگام تلاش برای به حرکت درآوردن موتورها از منبعی است که توسط ترانزیستورهای گسسته کنترل می شود، که قادر به ارائه یک خروجی جریان متغیر خاص نیست. درایوهای فرکانس متغیر از این اصل برای کار استفاده می کنند.

بسیاری از خروجیهای کنترلرها از استراتژی سیگنالهای روشن/خاموش پالس برای ارائه مقدار محدودی جریان به یک دستگاه بار استفاده میکنند. این فرآیند پالس ولتاژ به خروجی های دیجیتال گسسته اجازه می دهد تا دستگاه های آنالوگ را هدایت کنند، اگرچه هنوز ولتاژ خروجی آنالوگ واقعی ایجاد نمی کند.
این روش بهویژه در خروجیهای موتور به دلیل قدرت مورد نیاز برای هدایت بارهای موتورها رایج است. برای راهاندازی با گشتاور و سرعت مناسب باید مقدار مشخصی نیرو به موتور تحویل داده شود. این توان حاصل ضرب ولتاژ و جریان است. اگر ولتاژ کاهش یابد، توان مستقیماً تحت تأثیر قرار می گیرد، بنابراین نمی توانیم ولتاژ را کاهش دهیم و همچنان انتظار داشته باشیم که گشتاور لازم برای جابجایی بار را داشته باشیم. بنابراین به عنوان یک روش کاهش سرعت، کاهش ولتاژ عملی نیست. این مفهوم واقعاً فقط در مواردی از روش های راه اندازی با ولتاژ کاهش یافته، دیده می شود.
برای غلبه بر این چالش، باید راهی برای ارائه ولتاژ و جریان کامل وجود داشته باشد و در عین حال سرعت حرکت موتور را به نحوی کاهش دهد. در موتورهای DC، مانند موتور اسباب بازی، این کار را می توان با کاهش میانگین جریان محرک میدان مغناطیسی در روتور انجام داد که میزان سرعت جابجایی برس ها را تغییر می کند. تکنیک مدولاسیون عرض پالس (PWM) به سادگی این کار را انجام داد.
در موتورهای AC سه فاز، یک پالس ساده ولتاژ باعث تغییر سرعت نمی شود، زیرا برای عملکرد صحیح، ولتاژ باید قطبیت را نیز تغییر دهد. به طور دقیق، باید این کار را در یک فرکانس بسیار خاص انجام دهد تا RPM خروجی صحیح را بدست آورد. این برخلاف موتور DC است که در آن سرعت چرخش به طور خودکار سرعت معکوس کردن برس ها را کنترل می کند، چیزی شبیه به بازخورد خودکار. از طرف دیگر موتور AC باید توسط یک منبع خارجی جایگزین شود.
PWM چگونه کار می کند؟
دو مفهوم کلیدی وجود دارد که باید به خاطر داشته باشید تا بفهمید مفهوم PWM چگونه کار می کند. اول، یک فرکانس حامل PWM ثابت، محاسبه مدت ولتاژ را کنترل می کند. این فرکانس باید آنقدر زیاد باشد که دستگاه خروجی نتواند با هر پالس به طور فیزیکی روشن و خاموش شود. اگر این کار را انجام دهد، منجر به ضربدر چرخش موتور می شود که می تواند باعث آسیب شود. خبر خوب این است که موتورها زمان واکنش نسبتاً آهستهای به جریان اعمالی دارند، بنابراین فرکانسهای حامل PWM نباید بسیار بالا باشند، بلکه اغلب در ناحیهای از چند صد هرتز تا چند هزار هرتز قرار دارند.
برای مرجع، کنترلرهای کوچک مانند میکروکنترلر محبوب Arduino Uno، فرکانس حامل PWM برای اکثر پین ها حدود 500 هرتز است. در Allen-Bradley PowerFlex 525 VFD، فرکانس حامل روی 4 کیلوهرتز پیش فرض است. برای بسیاری از درایوهای صنعتی، فرکانس باید با فیلترهای خط نصب شده مطابقت داشته باشد.
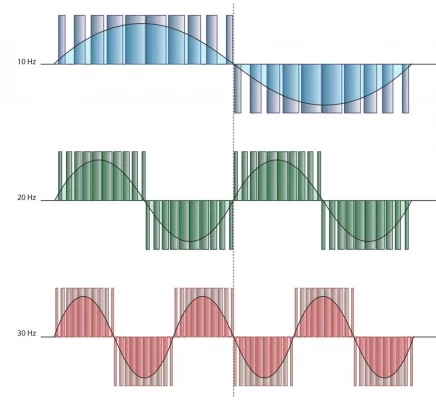
با این فرکانس ثابت، یک ولتاژ DC دیجیتال ممکن است برای بخشی از این زمان روشن شود، سپس برای بقیه زمان خاموش شود. به عنوان مثال، با فرکانس حامل 1 کیلوهرتز، زمان برای هر چرخه 1 میلی ثانیه خواهد بود. ولتاژ DC ممکن است برای 0.5 میلی ثانیه روشن شود، سپس برای 0.5 میلی ثانیه باقیمانده خاموش شود. بار با راهاندازی کوتاه پاسخ می دهد، اما اگر این الگوی روشن/خاموش/روشن/خاموش ثابت تکرار شود، پاسخ کلی دقیقاً نیمی از حداکثر RPM پاسخ موتور خواهد بود. اگر مدت زمان «روشن» پالس افزایش یابد، موتور سریعتر میچرخد، تا زمانی که در نهایت به ولتاژ کامل برای کل چرخه میرسد که همان تامین ولتاژ ثابت است.
نسبت مدت زمان پالس ON تقسیم بر زمان سیکل TOTAL “چرخه کاری” خروجی PWM نامیده می شود و به صورت درصدی از 0٪ -100٪ بیان می شود. برای موتورهای DC، یک چرخه کاری ثابت، سرعت ثابت و در عین حال دقیق قابل تنظیمی را به همراه دارد.
چگونه VFD یک موتور AC را با PWM کنترل می کند؟
برای موتور AC سه فاز، هر ورودی فاز ممکن است جداگانه در نظر گرفته شود. در واقعیت، هر فاز 5.55 میلیثانیه عقبتر از فاز قبلی (⅓ سیکل 60 هرتز) تاخیر میکند، اما هر فاز به سادگی یک کپی از مفهوم اصلی PWM است.
ابتدا، ولتاژ باید قطبیت های متناوب را تغییر دهد تا موج AC مورد نیاز را ایجاد کند، بنابراین ترانزیستورها (MOSFET) که خروجی ها را هدایت می کنند در یک پیکربندی معکوس به نام “H-Bridge” متصل می شوند که به کنترل کننده اجازه می دهد قطبیت خروجی را فقط در حد تغییر کند. لحظه مناسب برای ایجاد مجدد سیگنال 60 هرتز.
هنگامی که موج AC ایجاد شده به صورت دیجیتالی شروع می شود، چرخه کار تقریباً 0٪ است (بنابراین جریانی وجود ندارد)، اما بسیار سریع شروع به افزایش می کند. سرعت تغییر با بالا رفتن به 100٪ کاهش می یابد، در واقع، مشخصه یک منحنی دقیق سینوسی است، درست مانند ولتاژ خط اصلی. خود چرخه وظیفه مطابق با جریان متوسطی است که به سیمپیچهای موتور عرضه میشود، بنابراین انتظار داریم که میدانهای مغناطیسی سیمپیچها با سرعت بسیار دقیق تغییر کنند.
برای یک موتور با چرخش آهسته، سرعت افزایش چرخه کار نسبتاً آهسته خواهد بود. به محض رسیدن به 100٪، چرخه وظیفه بلافاصله شروع به کاهش مجدد به 0٪ می کند. سپس قطبیت تغییر خواهد کرد و چرخه تکرار خواهد شد.
یکی از سادهترین راهها برای در نظر گرفتن خروجی PWM یک VFD، نگاه کردن به منحنی ولتاژ AC استاندارد است. اما به جای خواندن آن بهعنوان «ولتاژ»، آن را بهعنوان «چرخه وظیفه» بخوانید. از آنجایی که چرخه وظیفه بهصورت دیجیتالی ایجاد میشود، بسته به نیاز میتوان آن را بسیار آهسته یا سریع ایجاد کرد.
شما نباید سعی کنید یک موتور را با فرکانس بالاتر از حداکثر مشخصه پلاک آن راه اندازی کنید، اما فرکانس حامل PWM چندین برابر بیشتر خواهد بود. همچنین، توجه به این نکته مهم است که فرکانسهای حامل بالاتر میتوانند تداخل و نویز الکتریکی بیشتری ایجاد کنند، اما فرکانس کمتر باعث میشود مقدار جریان بیشتری از هر ترانزیستور در هر سیکل PWM جریان داشته باشد و گرمای بسیار بیشتری تولید کند. بنابراین، باید به توصیه سازنده در مورد فرکانس حامل توجه کنید.

{kind=link}