
مقدمه ای بر انواع کنترل موتور حلقه بسته
کنترل موتور حلقه بسته یک سیستم کنترلی است که برای تنظیم خروجی موتور استفاده می شود. با چهار نوع متداول سیستم های کنترل موتور حلقه بسته آشنا شوید تا عملکرد و کاربردهای هر یک از آنها را درک کنید.
سیستم کنترلی که در آن خروجی بر ورودی های بعدی فرآیند تأثیر می گذارد، به عنوان یک سیستم کنترل حلقه بسته شناخته می شود. خروجی با معیار مورد نظر مقایسه می شود – اگر از آن معیار واگرا شود، ورودی به طور خودکار تنظیم می شود تا به خروجی مورد نظر برسد. به عبارت ساده، ورودی با گرفتن بازخورد از خروجی تنظیم می شود.
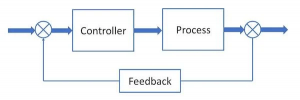
شکل 1. شماتیک سیستم کنترل حلقه بسته
یک سیستم تهویه مطبوع یک نمونه عالی از یک سیستم کنترل حلقه بسته است که ما هر روز با آن روبرو می شویم. کاربر دمای مورد نظر را تنظیم می کند و کولر شروع به کار می کند. در حالی که روشن است، واحد AC دمای اتاق را بررسی می کند. اگر اتاق گرمتر از دمای تنظیم شده باشد، به کار خود ادامه می دهد. وقتی به دمای مطلوب رسید، متوقف می شود. این یک سیستم کنترل حلقه بسته بسیار ساده است. واحد AC دمای اتاق را کنترل می کند و تعیین می کند که آیا به کار ادامه دهد یا متوقف شود.
سیستم های کنترل حلقه بسته به کنترل موتور نیز بسط داده میشود. در این مقاله، انواع مختلف سیستم های کنترل حلقه بسته موتور را برای درک عملکرد و کاربردهای هر یک بررسی می کنیم.
کنترل موتور حلقه بسته
در کاربردهای صنعتی، کنترل خروجی موتور مورد نیاز است. کنترل حلقه بسته یک موتور کنترل پیشرفته ای را با حداقل نیاز به دخالت انسان ارائه می دهد.

شکل 2. کنترل موتور حلقه بسته، عملکرد داخلی موتور را تنظیم می کند.
کنترل حلقه بسته موتور یک سیستم کنترلی است که برای تنظیم خروجی موتور استفاده می شود. یک سنسور به طور مداوم ویژگی های خروجی موتور را اندازه گیری می کند و خروجی سنسور به عنوان بازخورد برای تنظیم ورودی عمل می کند. سنسور می تواند یک سرعت سنج، انکدر نوری، سنسور موقعیتی از نوع هال یا سنسور چرخشی باشد. بستگی به نوع موتوری دارد که باید تنظیم شود.
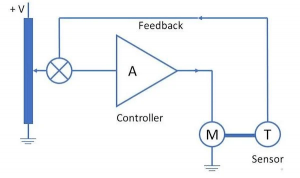
شکل 3. شماتیک کنترل موتور حلقه بسته
کنترل موتور حلقه بسته یکی از رایج ترین روش ها برای تنظیم سرعت خروجی در شرایط بار متغیر موتور است.به طور مثال هنگامی که وضعیت بار تغییر می کند، سرعت موتور تغییر می کند و بازخورد در نقطه تنظیم ورودی به پتانسیومتر داده می شود. این حلقه تا رسیدن به سرعت مورد نظر ادامه می یابد. همچنین می توان از کنترل موتور حلقه بسته برای کنترل گشتاور، بهبود دقت حالت پایدار و محافظت از موتور استفاده کرد.
انواع سیستم های کنترل حلقه بسته
شماتیک کلی کنترل موتور حلقه بسته در شکل 4 در بالا پایین داده شده است. بخش های اصلی سیستم یک کنترل کننده، محدود کننده جریان، سنسور و مبدل هستند. مبدل فرکانس متغیر را به فرکانس ثابت و فرکانس ثابت را به فرکانس متغیر تبدیل می کند. همانطور که از نام آن پیداست، محدود کننده جریان اجازه نمی دهد جریان فراتر از مقدار تعیین شده افزایش یابد.این مقاله چهار نوع کنترل موتور حلقه بسته را شرح داده است.
کنترل جریان
کنترل جریان برای محدود کردن جریان به مبدل و موتور برای عملیات تغییر سرعت استفاده می شود. فیدبک جریان پس از اندازه گیری توسط سنسور به سیستم کنترلی اعمال میشود.
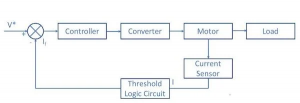
شکل 4. شماتیک برای کنترل حد جریان
مدار منطقی حد آستانه فقط تا زمانی نظارت می کند که جریان موتور کمتر از حداکثر جریان مجاز باشد. هنگامی که بیشتر شد، حلقه بازخورد فعال می شود و جریان را به حالت عادی وادار می کند، و پس از رسیدن به آن، حلقه بازخورد غیرفعال می شود.
کنترل گشتاور حلقه بسته
کنترل گشتاور حلقه بسته در خودروهای برقی و لوکوموتیوها رایج است. گشتاور مورد نظر برای موتور توسط شتاب دهنده به عنوان گشتاور مرجع (T*) در شکل 5 زیر تعیین می شود.
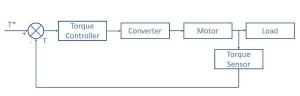
شکل 5. شماتیک برای کنترل گشتاور حلقه بسته
خروجی موتور با استفاده از سنسور گشتاور اندازه گیری می شود. اگر گشتاور اندازه گیری شده کمتر از گشتاور مورد نظر باشد، کنترل کننده گشتاور فشار می آورد تا گشتاور بیشتری ارائه دهد. ادامه می دهد تا به گشتاور مورد نظر برسد. در خودروها و خودروهای برقی، این تنها چند ثانیه طول میکشد. حلقه بازخورد چندین بار در یک بازه زمانی کوچک فعال می شود.
کنترل سرعت حلقه بسته
یک سیستم کنترل سرعت حلقه بسته دارای چندین حلقه بازخورد برای کنترل موتور است. حلقه داخلی یک حلقه کنترل بسته محدود جریان ساده است. حلقه داخلی نیز گشتاور خروجی را زیر حد مطمئن نگه می دارد. حلقه بیرونی به کنترل سرعت موتور کمک می کند. شماتیک کنترل سرعت حلقه بسته در زیر آورده شده است.
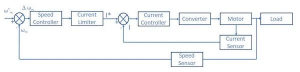
شکل 6. شماتیک برای کنترل سرعت حلقه بسته
سرعت مرجع سیستم ω* m است و سرعت واقعی موتور که توسط سنسور سرعت اندازه گیری می شود ω m است. این یک خطای مثبت Δ ω* m ایجاد می کند. این خطای سرعت از کنترل کننده سرعت و محدود کننده جریان عبور می کند. حتی برای خطاهای کوچک اضافه جریان، محدود کننده جریان اجازه افزایش جریان برای زمان کوتاه را میدهد و جریان مرجع را برای حلقه کنترل بسته داخلی تنظیم می کند تا بتواند از این مرحله عبور کند. این کار باعث افزایش شتاب موتور و افزایش سرعت آن می شود. این خطای سرعت Δ ω* m را کاهش می دهد .
هنگامی که سرعت موتور با سرعت مرجع برابر می شود و بعداً یک خطای سرعت منفی جمع می شود، محدود کننده جریان اشباع می شود و شروع به عمل به عنوان ترمز برای موتور می کند. به این ترتیب یک کنترل سرعت حلقه بسته ساده کار می کند.
کنترل سرعت حلقه بسته درایوهای چند موتوره
چنین سیستم های کنترلی زمانی استفاده می شوند که چندین درایو بار را به اشتراک مدیریت بکنند. هنگامی که موتورهای مختلف به صورت همزمان کار می کنند تا بار یکسانی را به اشتراک بگذارند، سرعت و گشتاور باید کنترل شوند تا از عدم تعادل در بار مشترک بین موتورها جلوگیری شود. حتی اگر موتورهای محرک مختلف دارای توانهای متفاوتی باشند، باید با سرعت یکسانی کار کنند.
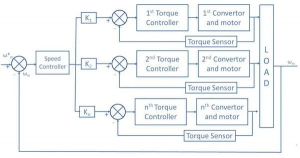
شکل 7. شماتیک برای کنترل سرعت حلقه بسته درایوهای چند موتوره
باید توجه داشت راه اندازی چند موتور به صورت همزمان برای یک بار مثل نوار نقاله چالشهایی از نظر همزمانی تولید گشتاور مورد نیاز توسط موتور ها دارد که در صورتی که از موتور ها با توان متفاوت استفاده شود این چالش بیشتر میشود ، به این صورت که موتور با گشتاور بالاتر باید موتور با گشتاور پایین را جبران کند


{kind=link}