
تاریخچه درایوهای فرکانس متغیر (VFD)
هنگامی که تسلا برای اولین بار موتور القایی جریان متناوب 3 فاز (AC) را در سال 1888 معرفی کرد، می دانست که اختراع او کارآمدتر و قابل اعتمادتر از موتور جریان مستقیم (DC) ادیسون است. با این حال، کنترل سرعت موتور AC به تغییر شار میدان مغناطیسی یا تغییر تعداد قطب های موتور نیاز دارد. حتی چندین دهه پس از استفاده گسترده از موتور القایی، تغییر فرکانس برای کنترل سرعت یک کار بسیار دشوار باقی ماند - و ساختار فیزیکی موتور مانع از تولید موتورهایی با بیش از دو سرعت شد.
در نتیجه، موتورهای DC در جایی که کنترل دقیق سرعت و توان خروجی مورد نیاز باشد ضروری بودند. برخلاف الزامات کنترل سرعت موتور AC، کنترل سرعت موتور DC با قرار دادن یک رئوستا یا تنظیم ولتاژ در مدار میدان DC ، که با فناوری موجود امکان پذیر بود، به دست آمد. این کنترلهای ساده موتور، سرعت و گشتاور را تغییر میدادند و برای چندین دهه مقرون به صرفهترین راه برای انجام این کار بودند.
در دهه 1980، فناوری درایو موتور AC به اندازه کافی قابل اعتماد و ارزان شد تا با کنترل موتورهای DC سنتی رقابت کند. این درایوهای فرکانس متغیر (VFD) سرعت موتورهای القایی AC استاندارد یا سنکرون را به دقت کنترل می کنند. با VFD ها، کنترل سرعت با گشتاور کامل از سرعت صفر تا حداکثر سرعت نامی و در صورت نیاز، بالاتر از سرعت نامی در گشتاور کاهش یافته به دست می آید. VFD ها فرکانس خروجی خود را با اصلاح یک جریان AC ورودی به DC و سپس با استفاده از مدولاسیون عرض پالس ولتاژ برای بازسازی شکل موج جریان AC و ولتاژ خروجی دستکاری می کنند. با این حال، این فرآیند تبدیل فرکانس باعث از دست دادن 2٪ تا 3٪ به عنوان گرما در VFD می شود . این فرآیند همچنین باعث افزایش ولتاژ و اعوجاج جریان هارمونیک در خروجی درایو می شود، که در صورت نیاز به بر طرف کردن نیاز به استفاده از فیلتر های حذف هارمونیک دارد.
انواع درایو فرکانس متغیر
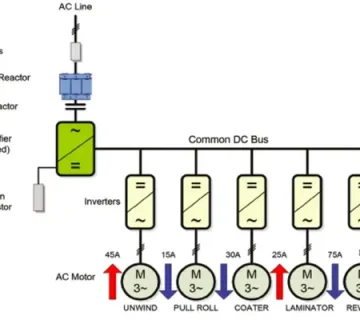
سه نوع متداول VFD وجود دارد. Current source inversion (CSI) که میتواند در مواقعی که درایو بر اثر نوع کاربری در حالت ژنراتوری قرار میگیرد جریان برگشتی از موتور را به شبکه برق انتقال دهد و باعث صرفه جویی در مصرف برق بویژه در توانهای بزرگ گردد. VFD های CSI تنها نوعی هستند که این قابلیت را دارند. به عبارت دیگر، آنها می توانند جریان برق را از موتور به منبع تغذیه جذب کنند. CSI VFD ها شکل موج جریان بسیار تمیزی را ارائه می دهند، اما در ساخت خود به سلف های بزرگ و گران قیمت نیاز دارند و باعث ایجاد چرخش (حرکت ضربانی در حین چرخش) زیر 6 هرتز می شوند.
درایوهای Voltage source inversion(VSI) ولتاژ برگشتی ضریب توان ضعیفی دارند، میتوانند باعث گیرکردن موتور زیر 6 هرتز شوند و برگشت پذیر نیستند. در نتیجه بدلایلی که گفته شد، درایوهای CSI و VSI به طور گسترده مورد استفاده قرار نگرفته اند.
VFD های مدولاسیون عرض پالس (PWM) به دلیل ضریب توان ورودی عالی به دلیل ولتاژ باس DC ثابت، عدم اتصال موتور، راندمان بالاتر و هزینه کمتر، بیشتر در صنعت استفاده می شوند. یک PWM VFD از یک سری از
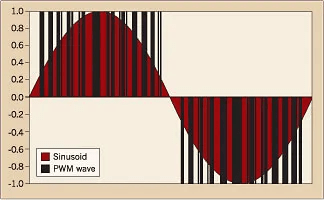
پالس های ولتاژ با طول های مختلف برای شبیه سازی یک موج سینوسی. در حالت ایده آل، پالس ها به گونه ای زمان بندی می شوند که انتگرال میانگین زمانی درایو یک سینوسی کامل را ایجاد کند. روش فعلی انتخابی برای تولید این شکل موج، یک موج مثلثی و موج سینوسی را از طریق مقایسهکننده اجرا میکند، و هر زمان که مقدار موج سینوسی از موج مثلث بیشتر باشد، یک پالس ولتاژ خروجی میدهد. قطعه الکترونیکی انتخابی برای تولید پالس ولتاژ، insulated gate bipolar transistor (IGBT) است، اگرچه silicon-controlled rectifiers (SCRs) نیز می توانند این کار را انجام دهند. در آینده نزدیک، تinjection-enhanced gate transistors (IEGT) برای انجام این کار استفاده خواهند شد. در دراز مدت تر، memristors احتمالاً قطعه انتخابی برای این کار خواهند بود.
اصول درایوهای فرکانس متغیر:
VFD چیست؟
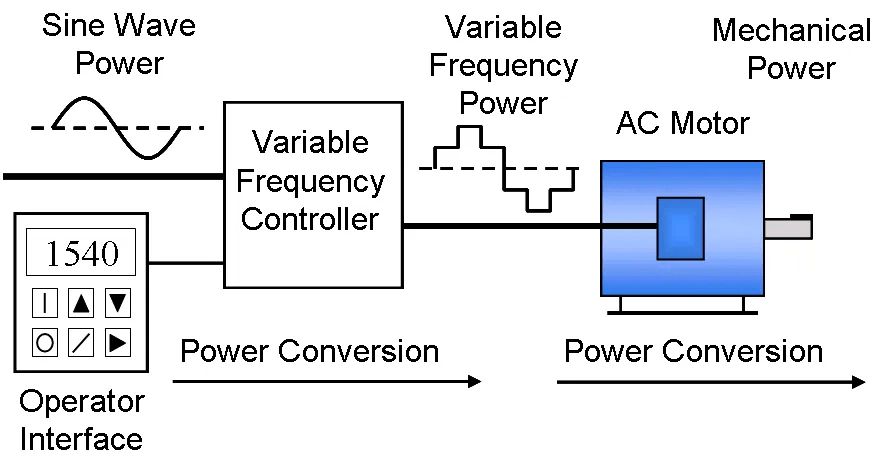
درایو فرکانس متغیر (VFD) نوعی کنترل کننده موتور است که موتور الکتریکی را با تغییر فرکانس و ولتاژ تولید شده به موتور الکتریکی به حرکت در می آورد. نام های دیگر VFD عبارتند از: درایو با سرعت متغیر ، درایو سرعت قابل تنظیم ، درایو فرکانس قابل تنظیم ، درایو AC ، میکرودرایو و اینورتر .
فرکانس (یا هرتز) به طور مستقیم با سرعت موتور (RPMs) مرتبط است. به عبارت دیگر، هرچه فرکانس سریعتر باشد، RPM سریعتر می رود. اگر یک برنامه کنترلی برای کارکردن با محدوده سرعت صفر تا کامل به موتور الکتریکی نیاز داشته باشید، می توان از VFD برای برآورده کردن نیازهای بار موتور الکتریکی و پروسه کنترلو حفاظت موتور استفاده کرد. همانطور که بر اساس نیاز بار سرعت موتور تغییر می کند، VFD می تواند به سادگی سرعت موتور را کم یا زیاد کند تا سرعت مورد نیاز را برآورده شود.
درایو فرکانس متغیر چگونه کار می کند؟
اولین مرحله از درایو AC فرکانس متغیر یا VFD، مبدل است. مبدل از شش دیود تشکیل شده است که مشابه شیرهای یک طرفه مورد استفاده در سیستم های لوله کشی است. آنها اجازه می دهند جریان فقط در یک جهت جریان یابد. جهت نشان داده شده توسط فلش در نماد دیود. به عنوان مثال، هر گاه ولتاژ فاز A (ولتاژ مشابه فشار در سیستمهای لولهکشی) مثبتتر از ولتاژ فاز B یا C باشد، آن دیود باز میشود و به جریان اجازه عبور میدهد. هنگامی که فاز B نسبت به فاز A مثبت تر می شود، دیود فاز B باز می شود و دیود فاز A بسته می شود. همین امر برای 3 دیود در سمت منفی لینک DCنیز صادق است. بنابراین، با باز و بسته شدن هر دیود، شش "پالس" جریان عبور میکند. این "VFD شش پالسی" نامیده می شود، که پیکربندی استاندارد برای درایوهای فرکانس متغیر با ورودی سه فاز است.
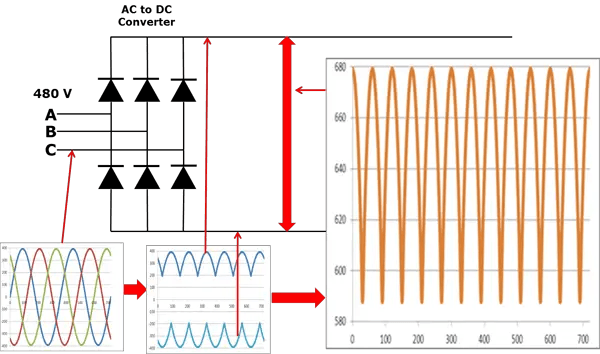
فرض کنید درایو بر روی یک سیستم برق 480 ولت کار می کند. امتیاز 480 ولت (RMS) root-mean-square است. پیک ها در سیستم 480 ولت 679 ولت هستند. همانطور که می بینید، باس VFD dc دارای ولتاژ dc با ریپل AC است. ولتاژ تقریباً بین 580 تا 680 ولت است.
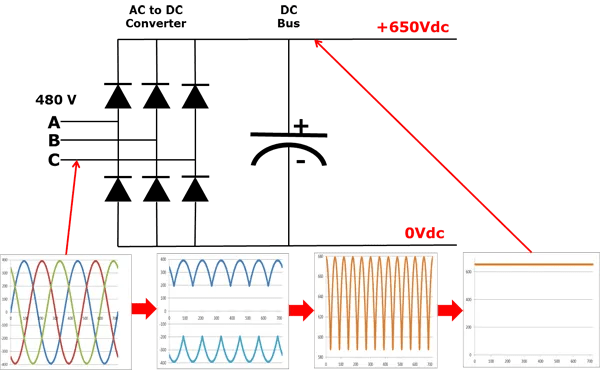
ما می توانیم با اضافه کردن یک خازن از شر موج AC در باس DC خلاص شویم. یک خازن به روشی شبیه به یک مخزن یا باتری در یک سیستم لوله کشی عمل می کند. این خازن امواج ac را جذب می کند و یک ولتاژ DC صاف را ارائه می دهد. موج AC در باس DC معمولا کمتر از 3 ولت است. بنابراین، ولتاژ در باس DC "تقریبا" 650VDC می شود. ولتاژ واقعی به سطح ولتاژ خط AC تغذیه کننده درایو، سطح عدم تعادل ولتاژ در سیستم قدرت سه فاز، بار موتور، امپدانس سیستم قدرت و هر راکتور یا فیلتر هارمونیک روی درایو بستگی دارد.
مبدل پل دیودی که AC به DC را تبدیل می کند، گاهی اوقات فقط به عنوان مبدل نامیده می شود. مبدلی که dc را به ac تبدیل می کند نیز یک مبدل است، اما برای تمایز آن از مبدل دیود، معمولاً به آن "اینورتر" می گویند. در صنعت رایج شده است که به هر مبدل DC به AC به عنوان یک اینورتر اشاره شود.
توجه داشته باشید که در یک VFD واقعی، سوئیچ های نشان داده شده در واقع ترانزیستور یا تریستور هستند.
وقتی یکی از کلیدهای بالای اینورتر را می بندیم، آن فاز موتور به باس مثبت dc متصل می شود و ولتاژ آن فاز مثبت می شود. وقتی یکی از کلیدهای پایین مبدل را می بندیم، آن فاز به باس منفی dc متصل می شود و منفی می شود. بنابراین، ما میتوانیم کاری کنیم که هر فاز روی موتور به میل خود مثبت یا منفی شود و بنابراین میتوانیم هر فرکانسی را که میخواهیم تولید کنیم. بنابراین، می توانیم هر فازی را مثبت، منفی یا صفر کنیم.
موج سینوسی آبی فقط برای مقایسه نشان داده شده است. درایو این موج سینوسی را ایجاد نمی کند.
توجه داشته باشید که خروجی VFD یک شکل موج "مربعی" است. VFD ها خروجی سینوسی تولید نمی کنند. این شکل موج مربعی انتخاب خوبی برای یک سیستم توزیع عمومی نیست، اما برای یک موتور کاملاً مناسب است.
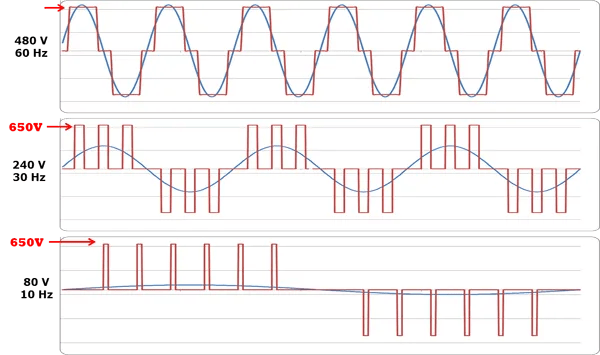
اگر بخواهیم فرکانس موتور را به 30 هرتز کاهش دهیم، به سادگی ترانزیستورهای خروجی اینورتر را آهسته تر روشن و خاموش می کنیم. اما اگر فرکانس را به 30 هرتز کاهش دهیم، برای حفظ نسبت V/Hz باید ولتاژ را نیز به 240 ولت کاهش دهیم. اگر تنها ولتاژی که داریم 650VDC است چگونه می خواهیم ولتاژ را کاهش دهیم؟
این مدولاسیون عرض پالس یا PWM نامیده می شود. تصور کنید که میتوانیم فشار را در یک لوله آب با روشن و خاموش کردن شیر با سرعت بالا کنترل کنیم. در حالی که این برای سیستم های لوله کشی کاربردی نخواهد بود، اما برای VFD بسیار خوب عمل می کند. توجه داشته باشید که در نیم سیکل اول، ولتاژ نیمی از زمان روشن و نیمی از زمان خاموش است. بنابراین، ولتاژ متوسط نصف 480 ولت یا 240 ولت است. با پالس کردن خروجی، می توانیم به هر ولتاژ متوسطی در خروجی VFD دست یابیم.

{kind=link}